DANCERS





Produced for Science per Forms, the robotic dancers were a chain of twelve CKBot modules developed at the ModLab with lightweight arm sections and end effectors. Each arm had three CKBot modules: a continuous rotation module at the top “shoulder” joint and “elbow” and “wrist” U-bar CKBot modules.
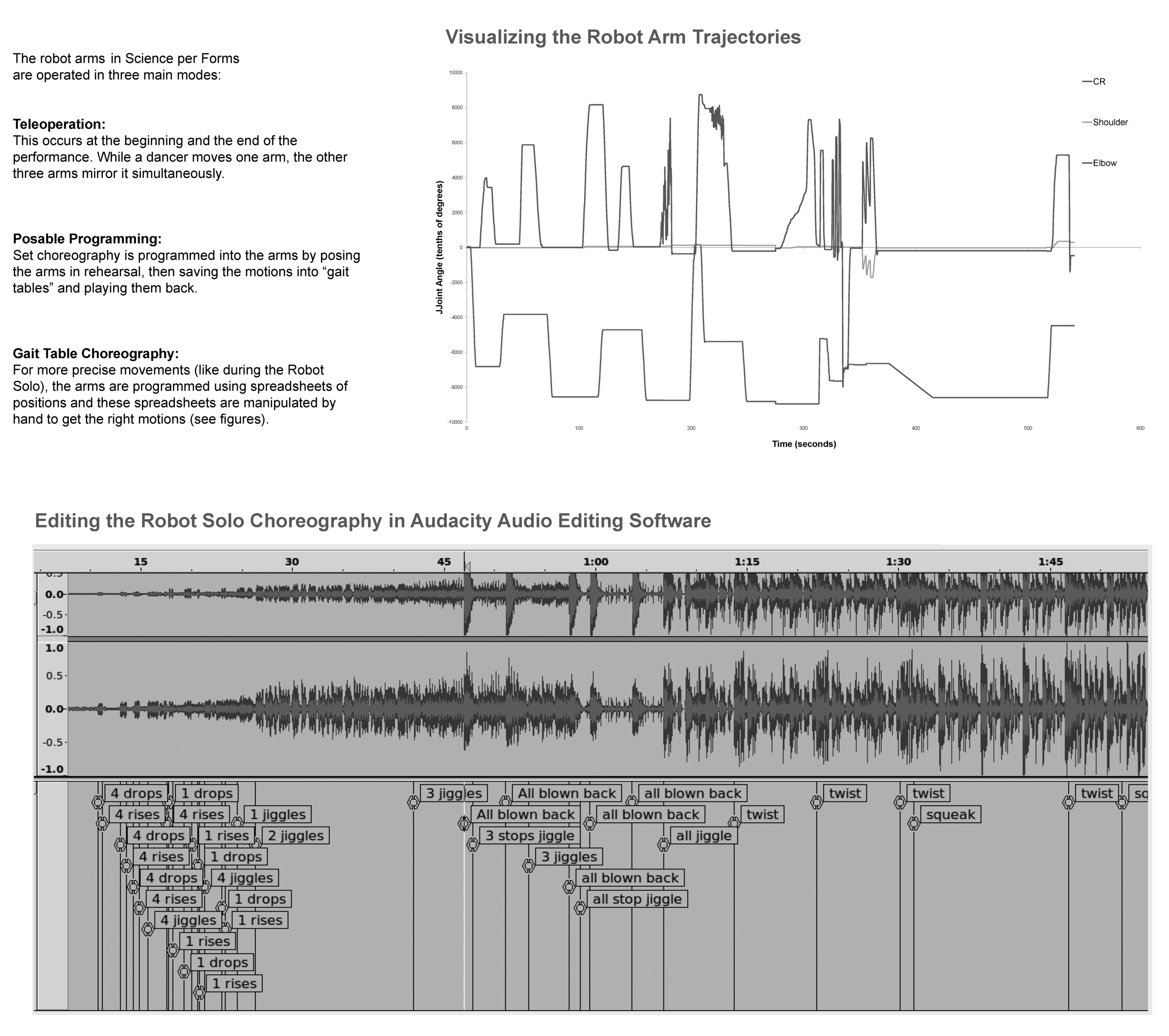
The programming for the modules was done in python. The performance involved three types of arm movement: teleoperable, where the dancers could move one arm and the other three would mirror the motion in real time, posable, where gaits were pre-recorded by the choreographers moving each arm and saving the motions, and gait table choreography, where ModLab choreographed the robot solo using excel gait tables and audacity audio editing software.
Team: Stella Latscha, Dean Wilhelmi, Matthew Picoli